Fatti
Il senso morale delle macchine senza pilota
Giovanni Drogo 28/10/2015
Le macchine senza pilota sognano pedoni elettrici?

Non si sono ancora placate le polemiche sui trucchetti degli ingegneri della Volkswagen che hanno inventato un modo truffaldino per ridurre le emissioni delle autovetture della casa automobilistica durante i test che già il mondo dei motori ci pone di fronte ad un altro dilemma. Questa volta si tratta delle auto che si guidano da sole le famose driverless car come quella progettata da Google oppure la Tesla con il pilota automatico.
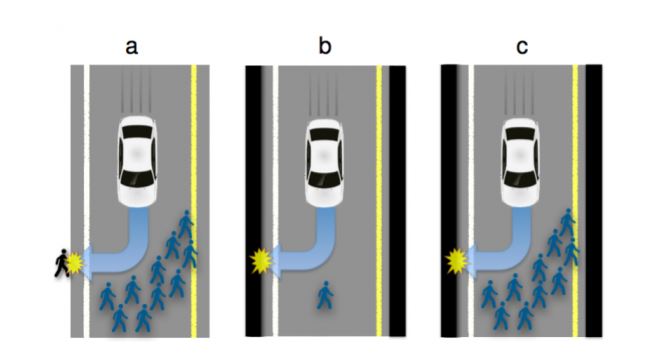
I tre scenari del MIT per spiegare le scelte etiche di un’automobile senza pilota
Come reagirebbe una macchina in uno sfortunato insieme di circostanze sfavorevoli?
A porci un interrogativo su come dovrebbe essere il comportamento delle auto robot in condizioni critiche è la Technology Review del MIT. La domanda è di quelle che mettono in gioco qualcosa che va oltre le leggi della robotica di Asimov: cosa dovrebbe fare una diverless car quando si trova a dover decidere della vita del passeggero o dei pedoni? Una questione era già stata affrontata in parte Federico Martelli su Vice qualche mese fa. Uno degli argomenti più forti a favore delle auto senza pilota è la sicurezza, un auto che si guida da sola rispetta i limiti di velocità e non causa incidenti. Perché se è vero che la maggior parte degli incidenti stradali è causato da distrazioni del conducente e dalla mancanza di disciplina da parte degli utenti della strada questi sono due aspetti che potrebbero essere senza dubbio risolti quando le macchine con il pilota automatico saranno la maggioranza delle vetture circolanti.

Oltre a questo altri aspetti positivi sono che grazie alle driverless car il traffico sarà meno congestionato e i consumi di carburante saranno ridotti con un grande risparmio per i consumatori e per l’ambiente. Rimane però un aspetto che, secondo quelli del MIT, non è ancora stato esplorato a sufficienza. Cosa succede quando la vettura incontra un utente che non è un robot? Finché si tratta di gestire le relazioni tra macchine automatiche il compito delle vetture del futuro è facile, ma immaginiamo di aggiungere all’equazione l’imprevedibilità intrinseca che ci piace assegnare agli esseri umani. Ad esempio il comportamento, non sempre razionale e rispettoso del codice della strada, dei pedoni. La domanda è questa: cosa dovrebbe fare la macchina nel caso si trovi di fronte all’eventualità di un incidente inevitabile? Le opzioni sul tavolo sono, per il MIT e per Jean-Francois Bonnefon della Toulouse School of Economics, tre: la macchina deve preservare in ogni circostanza la vita dei suoi occupanti, la macchina deve ridurre al minimo le perdite di vite umane (anche a costo di sacrificare l’occupante), oppure deve avere la possibilità di valutare tra questi due estremi. Ecco come viene presentato il dilemma dell’auto senza pilota:
One day, while you are driving along, an unfortunate set of events causes the car to head toward a crowd of 10 people crossing the road. It cannot stop in time but it can avoid killing 10 people by steering into a wall. However, this collision would kill you, the owner and occupant. What should it do?
I limiti della questione
Si tratta, ovviamente, di situazioni ipotetiche limite che metterebbero alla prova anche un guidatore umano, solo che generalmente l’essere umano ha la possibilità di compiere una scelta “egoista” ovvero quello di preservare la propria esistenza. Ovviamente nemmeno per la macchina la questione è così semplice, se a bordo ci sono dei bambini e il pedone invece è un anziano ottuagenario quale sarà l’opzione migliore? Vogliamo complicare ancora la situazione? Immaginiamo che una folla attraversi improvvisamente la strada e che la soluzione alternativa (sterzare bruscamente e schiantare la vettura) sia impraticabile perché anche il marciapiede è intensamente trafficato da pedoni. In questo caso la macchina cosa dovrebbe scegliere di fare? C’è da dire che difficilmente ci si trova, nella vita reale, a dover affrontare una folla (che rimane immobile) che attraversa la strada all’improvviso (quanto all’improvviso?) e che le situazioni più comuni in genere si possono riassumere in un “uno contro uno” tra macchina e pedone (o ciclista). Tutta la situazione ipotetica messa in piedi dal MIT e a Bonnefon quindi ha improvvisamente meno senso perché se nel futuro le macchine saranno in grado di comunicare tra loro sarà possibile eventualmente fermare il traffico per consentire alle macchine più a rischio di collisione di effettuare manovre di diversione in relativa sicurezza. Insomma è presumibile pensare che nella maggioranza dei casi le auto senza pilota saranno in grado di prevedere gli incidenti prima che accadano realmente perché il traffico stesso sarà più ordinato. Senza contare ad esempio il fatto che uno schianto contro il muro non è sempre fatale, soprattutto se l’auto rispetta i limiti di velocità, frena ed è dotata dei dispositivi di sicurezza in caso di incidente. Quindi forse il computer, una volta valutate le probabilità potrebbe scegliere di far schiantare la macchina sapendo che l’airbag e le cinture di sicurezza (che un pedone non ha) sono in grado di proteggere la vita dell’occupante. A tutto questo va aggiunto un discorso fondamentale: la situazione ipotetica (non escludiamo che ci sia una remota possibilità che una situazione del genere accada davvero) non tiene conto del fatto che le migliaia di vittime degli incidenti stradali sono, oggi, causate tutte da esseri umani.
Potrebbe interessarti anche
La replica di Fazio all’uomo che per strada gli ha urlato “i migranti portali a casa tua!”
Il presentatore stava attraversando sulle strisce pedonali quando, all’improvviso, qualcuno lo ha invitato a portare i migranti a casa sua
Il domatore Ivan Orfei aggredito da una tigre durante un numero al circo | VIDEO
Il domatore di 31 anni Ivan Orfei �è stato azzannato da una tigre durante un numero e risulta gravemente ferito al collo e alla gamba
La blastata perfetta di Greta Thunberg ad Andrew Tate arrestato per tratta di esseri umani
Greta Thunberg ha commentato la vicenda dell’arresto dell’ex campione di kickboxing con una nuovo (e definitivo) tweet
La nuova gaffe sull’Olocausto di Whoopi Goldberg: “Ebrei uccisi per motivi fisici, non razziali”
Dopo lo scivolone dello scorso gennaio, Whoopi Goldberg è stata costretta a tornare a scusarsi per affermazioni offensive verso gli ebrei
Donna uccisa in casa e marito in fin di vita: fermata la figlia della coppia aggredita in provincia di Padova
La tragedia si è consumata all’interno di un appartamento di San Martino di Lupari. La 51enne viveva all’interno di quella casa, con i suoi genitori
Mamma 23enne senzatetto costretta a non riconoscere il neonato, Roccella: “Troppe rinunciano per povertà”
Sul caso della 23enne senzatetto è intervenuta pure la ministra per la Famiglia, la Natalità e le Pari Opportunità Eugenia Roccella
A Natale sette detenuti sono evasi dal carcere minorile Beccaria di Milano
I sette detenuti fuggiti dal carcere Beccaria avrebbero sfruttato un momento di distrazione di un agente per scappare
Vaccini falsi, la cantante Madame indagata per falso ideologico
Oltre a Madame, tra le decine di pazienti dei medici no vax c’è un’altra “cliente d’eccezione”, la tennista Camila Giorgi
Chi è Danilo Valeri, il ragazzo rapito a Roma: il padre era stato gambizzato a maggio
Rimangono da chiarire i contorni del rapimento di Danilo Valeri, che secondo gli agenti sarebbe legato al padre Maurizio, detto “il sorcio”
Giovanni Carbone suicida in carcere: lunedì aveva ucciso la compagna Eliana Maiori
Si è tolto la vita in carcere Giovanni Carbone, l’uomo che lo scorso 19 dicembre aveva ucciso la compagna 41enne Eliana Maiori Caratella








